Beyaz Kitap: Do?rulama Vekt?rü T7
Matthew C. Varley, Susanne Ellens, David Carey. Spor, Performans ve Beslenme Ara?t?rma Grubu, Yard?mc? Sa?l?k, ?nsan Hizmetleri ve Spor Okulu, La Trobe ?niversitesi, Melbourne, VIC, Avustralya.

1. G?R??
Sporcu takip sistemleri spor i?in ?nemli bir ara? haline gelmi?tir. Bu sistemler, uygulay?c?lar?n antrenman yükünü, fiziksel performans?, taktiksel davran??? ve yaralanma riskini daha iyi anlamak i?in sporcular?n hareketlerini ?l?melerine ve analiz etmelerine olanak tan?r.1
Bir?ok takip sistemi mevcut olsa da, ?o?u i? mekanlarda kullan?ld???nda s?n?rlamalara sahiptir. ClearSky yerel konumland?rma sistemi(LPS), kapal? ortamlarda sporcu performans?n?n izlenmesini ve ?l?ülmesini sa?layan bir teknolojidir. Sistem ?zellikle mesafe, h?z ve ivme gibi konum ve konumdan türetilen metriklerin ??kt?s?n? verir.
Vector T7, ClearSky sistemiyle birlikte kullan?lan yeni bir giyilebilir cihazd?r. Vector T7, 10 Hz ?rnekleme frekans?yla ClearSky ile kullan?lan ?nceki cihazlara (Vector S7 ve pg电子游戏 T6) benzer.
Bununla birlikte, Vector T7 konum elde etmek i?in Var?? Zaman Fark? (TDOA) protokolünü kullan?rken, ?nceki cihazlar ?ki Y?nlü Aral?k (TWR) protokolünü kullanmaktad?r. TDOA protokolünün avantaj?, konum verilerinin do?rulu?unu korurken TWR protokolüne k?yasla cihaz i?in ?nemli ?l?üde daha dü?ük gü? tüketimi gerektirmesidir.
Gü?teki bu azalma cihaz?n boyutunun kü?ülmesini sa?lar. Daha kü?ük cihaz boyutu, Vector T7 'nin kürek kemikleri aras?na geleneksel yerle?tirme veya bele yerle?tirme dahil olmak üzere sporcu üzerinde ?e?itli pozisyonlarda tak?lmas?na olanak tan?r.
Sporcu takip sistemleri, uygulay?c?lar?n antrenman ve ma? uygulamalar? hakk?nda karar vermelerine olanak tan?yan verilere güvenebilmeleri i?in sporcu hareketlerini ?l?me yeteneklerinin do?rulanmas?n? gerektirir. Tüm teknolojilerde oldu?u gibi, hem cihaz donan?m?nda hem de temel algoritmalar?nda iyile?tirmeler yap?ld?k?a üreticiler zaman i?inde güncellenmi? modelleri piyasaya süreceklerdir.
Her yeni model, yeni cihaz?n ?l?meyi ama?lad??? ?eyi (?rn. konum, h?z ve ivme) ?l?me yetene?ini belirlemek i?in do?rulama gerektirir.1 Bu genellikle cihazdan al?nan verilerin bir ?l?ütle kar??la?t?r?lmas?yla yap?l?r. Vicon sistemi, pozisyon ?l?ümü i?in alt?n standart olarak kabul edilen bir hareket yakalama kamera sistemidir. Vicon'un sporcu izleme teknolojisinin do?rulanmas?nda bir kriter ?l?ütü olarak kullan?lmas? yayg?nd?r.2, 3
?al??malar, do?rusal maksimal efor ve y?n de?i?tirme hareketleri de dahil olmak üzere tak?m sporlar?na ?zgü g?revler s?ras?nda mesafe, h?z ve ivme ?l?ümü i?in pg电子游戏 T6 cihazlar?n?n ge?erlili?ini de?erlendirmi?tir.4,5,6
Bu ?al??malarda ?l?üt olarak bir hareket yakalama kamera sistemi (Vicon veya Qualisys Oqus) kullan?lm?? ve tüm ?al??malarda pg电子游戏 T6 cihazlar?n?n sporcu hareketlerini de?erlendirmek i?in kabul edilebilir ge?erlili?e sahip oldu?u sonucuna var?lm??t?r. Vector T7'nin yak?n zamanda geli?tirildi?i g?z ?nüne al?nd???nda, bu cihaz?n do?rulanmas? gerekmektedir.
Bu nedenle, bu ?al??man?n amac? yeni Vector T7 cihazlar?n?n mesafe, h?z ve ivme ?l?ümü i?in ge?erlili?ini de?erlendirmektir.
→ .

2. Y?NTEMLER
Bu ?al??maya rekreasyonel olarak aktif alt? erkek kat?l?mc? (28.8 ± 5.6 ya?) kat?lm??t?r. Tüm kat?l?mc?lar ?al??maya kat?l?mlar? i?in yaz?l? onay vermi? ve kullan?lan prosedürler La Trobe ?niversitesi ?nsan Ara?t?rmalar? Etik Kurulu'nun onay? ile ger?ekle?tirilmi?tir.
Veri toplama i?lemi, ü? basketbol sahas?ndan olu?an 40 x 70 m ?l?ülerindeki bir spor salonunda ger?ekle?tirilmi?tir. Kat?l?mc?lar basketbol sahalar?ndan birinde 20 x 5 m'lik bir alanda yedi farkl? hareket denemesi ger?ekle?tirmi?tir. Denemeler s?ras?nda oyuncu hareket verileri bir LPS (pg电子游戏 ClearSky, pg电子游戏, Melbourne, Avustralya) ve 20 kameral? bir hareket analiz sistemi (Vantage, Vicon Motion Systems, Oxford, Birle?ik Krall?k) arac?l???yla toplanm??t?r.
Her bir denemenin a??klamas? ve ?emas? Tablo 1 ve ?ekil 1'de g?sterilmi?tir. Kat?l?mc?lardan tüm denemeleri maksimal yo?unlukta ger?ekle?tirmeleri ve denemenin sonunda tamamen durmalar? (yava?lama) istenmi?tir. Kat?l?mc?lar denemeye ba?lamadan ?nce 5 dakikal?k bir ?s?nma ger?ekle?tirmi?tir. Her hareket denemesi, her deneme ~3 dakika arayla toplam 14 deneme olacak ?ekilde iki kez ger?ekle?tirilmi?tir.?
Kat?l?mc?lara d?rt farkl? yere yerle?tirilmi? d?rt Vector T7 cihaz? tak?lm??t?r. Bir cihaz, üretici taraf?ndan tedarik edilen yelek kullan?larak kat?l?mc?n?n kürek kemikleri aras?na yerle?tirildi.
Kalan ü? cihaz kat?l?mc?lar?n beline, ?zellikle de ?n tarafa (iki anterior superior iliak omurga aras?ndaki orta noktan?n enine kesiti), sol tarafa (anterior ve posterior superior iliak omurgalar aras?ndaki orta noktan?n enine kesiti) ve arkaya (iki posterior superior iliak omurga aras?ndaki orta noktan?n enine kesiti) üretici taraf?ndan sa?lanan ve kat?l?mc?lar?n ?ortlar?na tak?lan ?zel bir bel band? klipsi i?ine yerle?tirilmi?tir.
Hareket denemelerinden ayr? olarak, Vector T7 cihazlar?n? sabit bir yerle?tirme protokolü kullanarak konumland?rmalar?n?n stabilitesi a??s?ndan de?erlendirmek i?in statik bir deneme ger?ekle?tirilmi?tir. ?? cihaz?n her biri bir tripod (1,5 m yükseklik) üzerine yerle?tirilmi? ve 10 dakikal?k bir süre boyunca veri toplamaya b?rak?lm??t?r. Cihazlardan ikisi orta sahan?n ortas?na, biri ise sahan?n geni? kenar?na yerle?tirilmi?tir.
ClearSky LPS spor salonunun etraf?na kurulmu? ve her bir dü?üm aras?nda ortalama 10,4 m mesafe olacak ?ekilde yerden ortalama 8,4 m yüksekli?e sabitlenmi? 21 ankraj dü?ümünden olu?mu?tur. Veriler 10 Hz'de yakalanm?? ve üretici yaz?l?m?OpenField sürüm 3.9.0) kullan?larak i?lenmi?tir. H?z, ivme, x-y konumu ve odometre (kümülatif mesafe) verileri daha fazla analiz i?in her deneme i?in d??a aktar?lm??t?r.
Kriter mesafe, h?z ve ivme ?l?ümü olarak 100 Hz'de ?rnekleme yapan 20 kameral? hareket analiz sistemi (Vicon) kullan?lm??t?r. Kameralar tripodlara monte edilmi? ve hareket denemelerinin yap?ld??? alan?n ?evresinden 3 m uza?a yerle?tirilmi?tir. ?retici taraf?ndan tedarik edilen yele?in ve Vector T7 cihazlar?n? i?eren her bir bel band? klipsinin d???na, her bir cihaz?n ortas?na denk gelecek ?ekilde 32 mm ?ap?nda d?rt adet retro reflektif i?aretleyici yerle?tirilmi?tir.??
Vicon verileri Vicon Nexus 2.14 ile etiketlenmi? ve i?lenmi?tir. Ham Vicon verilerinin i?lenmesi, kal?nt? analizine dayal? olarak belirlenen 3Hz kesme frekans?na sahip d?rdüncü dereceden dü?ük ge?i?li Butterworth filtresi kullan?larak filtrelemeden olu?mu?tur. Verilerdeki ≤50 ms (5 ?rnek) bo?luklar spline interpolasyonu kullan?larak doldurulmu?, ≥50 ms bo?luklar analizden ??kar?lm??t?r. Filtrelenmi? 100 Hz Vicon verilerinin XY koordinatlar? analiz i?in kullan?lm??, ClearSky iki boyutlu (2D) konumland?rma i?in yap?land?r?ld???ndan z koordinatlar? (dikey yer de?i?tirme) hesaplamalarda ihmal edilmi?tir.
Her hareket denemesindeki d?rt Vicon i?aretleyicisinin her biri i?in (n=320) 2D h?z, konumsal veriler farkl?la?t?r?larak ve üretici yaz?l?m?nda kullan?lan filtrenin ayn?s? LPS verilerine uygulanarak hesaplanm??t?r. Bu bilgi ara?t?rmac?lara üretici taraf?ndan sa?lanm??t?r; ancak üreticinin fikri mülkiyeti nedeniyle ayr?nt?lar burada yer almamaktad?r. Benzer ?ekilde ivme de h?z verilerinin farkl?la?t?r?lmas? ve üreticinin spesifikasyonlar? kullan?larak filtrelenmesiyle hesaplanm??t?r.
Vicon'dan elde edilen ?l?ümler 10Hz'e kadar a?a?? ?rneklenmi? ve ard?ndan korelasyonu en üst düzeye ??karan zaman ofsetini bulmak i?in h?z sinyalleri ?apraz ili?kilendirilerek pg电子游戏 verileriyle senkronize edilmi?tir. Tüm veri i?leme ve analiz i?lemleri R istatistiksel programlama dili (sürüm 4.0.4)7 ve gsignal paketi8 kullan?larak ger?ekle?tirilmi?tir.
Tablo 1. Hareket denemelerinin tan?m?
| Deneme # | A??klama |
| 1 | 5 m do?rusal sprint |
| 2 | 10 m do?rusal sprint |
| 3 | 20 m do?rusal sprint |
| 4 | 5 m do?rusal sprintten 45 derecelik Y?n De?i?imine ve 5 m do?rusal sprint |
| 5 | 5 m do?rusal sprintten 90 derecelik Y?n De?i?imine ve 5 m do?rusal sprint |
| 6 | 5 m do?rusal sprintten 180 derece Y?n De?i?tirmeye ve 5 m do?rusal sprint |
| 7 | Do?rusal sprintler ve Y?n De?i?tirme kombinasyonunu i?eren bir devre |
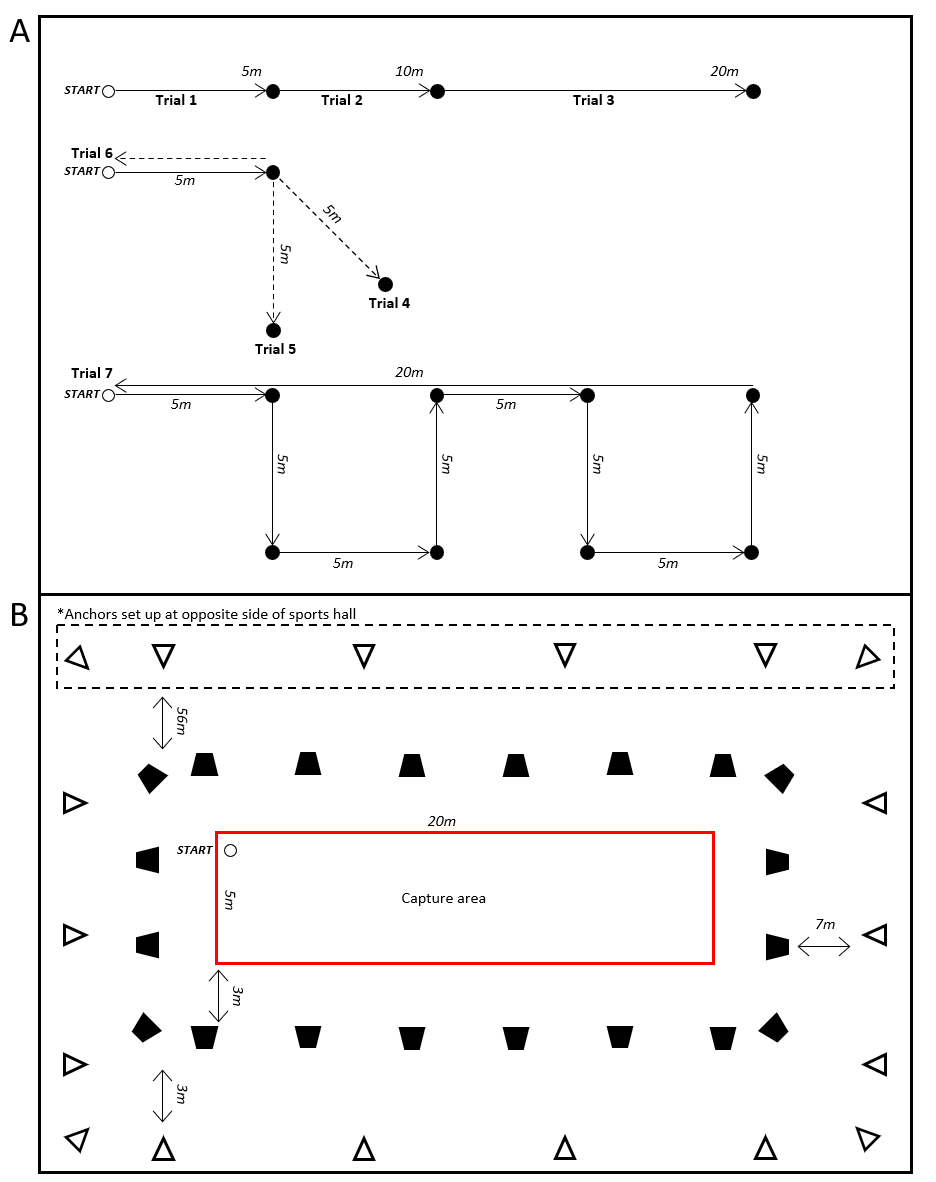
?ekil 1. A) Yedi farkl? hareket denemesinin ?emas?. B) Veri toplama s?ras?ndaki kurulum, tüm denemeler ba?lang?? referans noktas?ndan (beyaz daire), Vicon kameralardan (siyah yamuk), ClearSky ba?lant? dü?ümlerinden (beyaz ü?genler) ba?lam??t?r. Not: Tüm Spor Salonu (40 x 70m netlik a??s?ndan tam olarak g?sterilmemi?tir).
→ .

3. I?STATI?STI?KSEL ANALI?Z
Hareket denemeleri
Her deneme i?in Vector T7 ve Vicon'dan elde edilen veriler kar??la?t?r?larak a?a??daki ?l?ütler hesaplanm??t?r; h?z ve ivme i?in k?k ortalama standart fark (RMSD) ve ?rnekten ?rne?e konumsal mesafe i?in ortalama mutlak fark (MAD). 10'dan fazla eksik veriye sahip Vicon denemeleri, verilerde bo?luklar?n bulundu?u filtreleme yakla??m? taraf?ndan kenar etkilerinin ortaya ??kmas? nedeniyle analizlerden ??kar?lm??t?r (n = 12). Sonu?lar, tüm denemelerde ve cihaz konumu ve hareket türüne g?re tabakaland?r?lm?? olarak her bir ?l?üm i?in ortalama, medyan ve ?eyrekler aras? aral?klar (IQR) olarak sunulmu?tur.
Statik denemeler
Statik cihaz denemeleri i?in ?rnekten ?rne?e konumsal mesafe ve yer de?i?tirme hesaplanm??t?r. Sonu?lar ortalama, medyan, IQR ve mesafe i?in kümülatif toplam ve 10 dakikal?k denemede ilk numuneden son numuneye yer de?i?tirme olarak sunulmu?tur. ?retici metri?i "kilometre sayac?", hesaplanan mesafe i?in bir referans noktas? olarak her bir cihaz?n sonu?lar?na dahil edilmi?tir.
4. SONU?LAR
Hareket denemeleri
ClearSky LPS ile Vicon'dan elde edilen h?z aras?ndaki farklar Tablo 2 ve ?ekil 2'de g?sterilmektedir. Test edilen d?rt cihaz konumu aras?nda, yele?e tak?lan cihaz en kü?ük ortalama ve medyan RMSD'ye ve belin ?nüne tak?lan cihaz en yüksek RMSD'ye sahipti.
Bu g?zlem ivmedeki RMSD i?in de tekrarlanm??t?r(Tablo 3 ve ?ekil 2). Do?rusal hareket denemeleri, h?z i?in y?ntemler aras?nda en yak?n uyuma sahipti.1800 y?n de?i?tirme hareketi denemesi, ivme i?in en yüksek RMSD de?erleriyle sonu?lanm??t?r.
Tablo 2. pg电子游戏 cihazlar? ve Vicon hareket analiz sistemi aras?ndaki RMSD h?z? (m-s-1).
| N | Ortalama | Medyan | IQR | ||
| 罢ü尘ü | 308 | 0.19 | 0.14 | 0.11 - 0.21 | |
| Cihaz konumu | ? Yelek | 79 | 0.14 | 0.12 | 0.09 - 0.15 |
| ? Geri | 77 | 0.20 | 0.15 | 0.12 - 0.22 | |
| ? ?n | 76 | 0.24 | 0.17 | 0.14 - 0.27 | |
| ? Sol Taraf | 76 | 0.18 | 0.13 | 0.11 - 0.18 | |
| Hareket türü | ? Do?rusal | 140 | 0.17 | 0.12 | 0.09 - 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 - 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 - 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 - 0.17 | |
| ? Devre | 33 | 0.22 | 0.18 | 0.17 - 0.24 |
Tablo 3. pg电子游戏 cihazlar? ve Vicon hareket analiz sistemi aras?ndaki RMSD ivmesi (m-s-2).
| N | Ortalama | Medyan | IQR | ||
| 罢ü尘ü | 308 | 0.79 | 0.76 | 0.64 - 0.91 | |
| Cihaz konumu | ? Yelek | 79 | 0.75 | 0.74 | 0.62 - 0.81 |
| ? Geri | 77 | 0.77 | 0.76 | 0.60 - 0.91 | |
| ? ?n | 76 | 0.85 | 0.83 | 0.66 - 0.97 | |
| ? Sol Taraf | 76 | 0.79 | 0.79 | 0.65 - 0.88 | |
| Hareket türü | ? Do?rusal | 140 | 0.69 | 0.73 | 0.60 - 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 - 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 - 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 - 1.32 | |
| ? Devre | 33 | 0.77 | 0.80 | 0.73 - 0.86 |
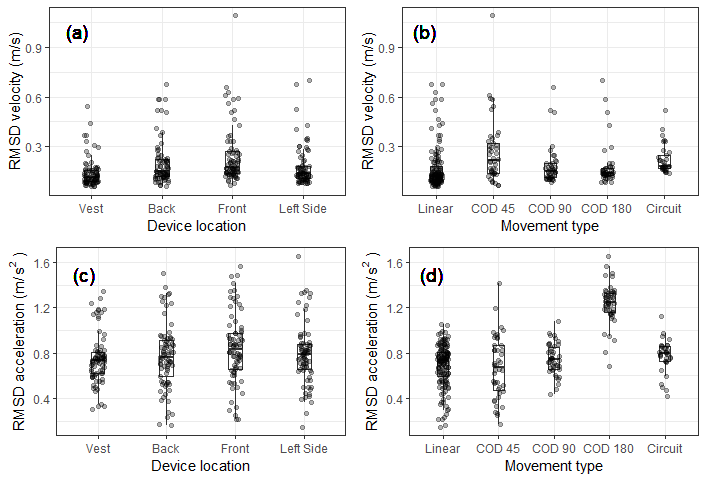
?ekil 2. Cihaz konumuna (ilk sütunlar) ve hareket türüne (ikinci sütun) g?re katmanland?r?lm?? her deneme i?in RMSD h?z (ilk sat?r) ve ivme (ikinci sat?r) sonu?lar?.
Tablo 4 'te Vector T7 ve Vicon konumsal takip verilerinden elde edilen ?rnekten ?rne?e mesafedeki MAD g?sterilmektedir. Tüm denemelerde ortalama fark 0,39 m'dir, belin ?nüne tak?lan cihazda ve devre hareketi denemesi s?ras?nda farklar daha büyüktür.
Tablo 4. pg电子游戏 cihazlar? ile Vicon hareket analiz sistemi aras?ndaki numuneden numuneye mesafedeki (m) MAD.
| N | Ortalama | Medyan | IQR | ||
| 罢ü尘ü | 308 | 0.04 | 0.03 | 0.02 - 0.05 | |
| Cihaz konumu | ? Yelek | 79 | 0.03 | 0.03 | 0.02 - 0.04 |
| ? Geri | 77 | 0.04 | 0.03 | 0.02 - 0.04 | |
| ? ?n | 76 | 0.05 | 0.04 | 0.03 - 0.06 | |
| ? Sol Taraf | 76 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Hareket türü | ? Do?rusal | 140 | 0.03 | 0.03 | 0.02 - 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 - 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 - 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 - 0.04 | |
| ? Devre | 33 | 0.07 | 0.06 | 0.05 - 0.09 |
Statik denemeler
Tüm sabit cihazlar i?in ortanca ve IQR ?rnekten ?rne?e mesafenin s?f?r olmas?(Tablo 5), zaman ad?mlar?n?n ?o?unda cihazlar?n x veya y koordinatlar?n? de?i?tirmedi?ini g?stermektedir.
Ancak cihazlar, numuneler aras?ndaki ortalama mesafe yakla??k 1-2 mm olacak ?ekilde baz? konum de?i?iklikleri kaydetmi?tir. 10 dakika boyunca gü?lü bir y?n sapmas? olmam??t?r ve cihazlar?n nihai konumu ba?lang?? konumlar?na ?ok yak?n olmu?tur (nihai yer de?i?tirme birka? santimetre mertebesinde).
?reticinin kümülatif mesafe hesaplamas?na ('kilometre sayac?' de?i?keni) dahil edilen ?zel veri i?leme ve filtreleme, konumdaki kü?ük de?i?iklikleri düzeltebilmi? ve 0,02 m'den daha az toplam mesafeler d?ndürmü?tür.
Tablo 5. Statik denemelerin sonu?lar?. Statik denemelerin sonu?lar? (ü? cihaz 10 dakika boyunca sabit b?rak?lm??t?r).
| x, y konumlar?ndan türetilmi?tir | |||||
| Ard???k ?rnekler aras?ndaki mesafe (m) | Son ?rnekte yer de?i?tirme (m) | Son numunedeki kilometre sayac? (m) | |||
| Cihaz | Ortalama | Medyan | IQR | ||
| 罢ü尘ü | 0.001898 | 0 | 0 - 0 | ||
| 1 | 0.001644 | 0 | 0 - 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 - 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 - 0 | (-0.06, -0.05) | 0.01 |
→ .
5. ?ZET
- Vector T7 cihazlar?, yüksek h?zlanma, yava?lama ve y?n de?i?tirme oranlar? i?eren hareket denemeleri s?ras?nda h?z ve ivme ?l?ümleri i?in dü?ük bir RMSD'ye ve mesafe ?l?ümleri i?in dü?ük bir MAD'ye sahipti.
- Vector T7 cihazlar?, RMSD'nin biraz daha yüksek oldu?u 180 derecelik y?n de?i?tirme hari? tüm hareket denemelerinde h?zlanma ?l?ümleri i?in benzer dü?ük RMSD sergilemi?tir. Bu durum muhtemelen bu denemedeki hareketlerin daha yüksek h?zlanma/yava?lama oranlar? i?ermesinden kaynaklanmaktad?r ve h?zdaki de?i?im oran? artt?k?a hatan?n da artt???n? g?stermektedir. Ancak bu hata yine de dü?ük kabul edilebilir (ortalama RMSD 1,24).?
- Yelek yerle?imi h?z, ivme ve mesafe ?l?ümleri i?in en dü?ük hatayla sonu?lan?rken, cihaz?n belin ?n k?sm?na yerle?tirilmesi en yüksek hatayla sonu?lanm??t?r. Cihaz yerle?iminden ba??ms?z olarak tüm konumlar, tüm RMSD ≤ 0,85 olan tüm ?l?ümlerde dü?ük hata ile sonu?lanm??t?r.?
- Vector T7 cihazlar?n?n sabit durumdaki konumsal kararl?l???, numuneler aras?ndaki ortalama ~1-2 mm mesafe ile yüksekti.
- Dü?ük hata, ClearSky ile birlikte kullan?lan Vector T7 cihaz?n?n, do?rusal maksimal eforlar ve y?n de?i?tirme hareketleri dahil olmak üzere tak?m sporlar?na ?zgü g?revler s?ras?nda ge?erli bir h?z, ivme ve mesafe ?l?ümü sa?lad???n? g?stermektedir.
→ .
6. REFERANSLAR
- Malone, J. J., Lovell, R., Varley, M. C., & Coutts, A. J. (2017). Kara kutuyu a?mak: sporda GPS cihazlar?n?n kullan?m?na y?nelik uygulamalar ve dikkat edilmesi gerekenler. Uluslararas? spor fizyolojisi ve performans? dergisi, 12(s2), S2-18.
- Linke, D., Link, D., & Lames, M. (2018). Elektronik performans ve takip sistemleri EPTS'nin saha ko?ullar?nda do?rulanmas?. PloS one, 13(7), e0199519.
- Linke, D., Link, D., & Lames, M. (2020). TRACAB'?n optik video izleme sistemlerinin futbola ?zgü ge?erlili?i. PloS one, 15(3), e0230179.
- Luteberget, L. S., Spencer, M., & Gilgien, M. (2018). pg电子游戏 ClearSky T6 yerel konumland?rma sisteminin i? mekan ko?ullar?nda tak?m sporlar?na ?zgü antrenmanlar i?in ge?erlili?i. Frontiers in physiology, 9, 115.
- Serpiello, F. R., Hopkins, W. G., Barnes, S., Tavrou, J., Duthie, G. M., Aughey, R. J., & Ball, K. (2018). Kapal? alan sporlar?nda lokomosyonu ?l?mek i?in ultra geni? bant yerel konumland?rma sisteminin ge?erlili?i. Journal of sports sciences, 36(15), 1727-1733.
- Hodder, R. W., Ball, K. A., & Serpiello, F. R. (2020). Birimler aras? mesafeyi ?l?mek i?in pg电子游戏 ClearSky T6 yerel konumland?rma sisteminin kriter ge?erlili?i. Sensors, 20(13), 3693.
- R ?ekirdek Ekibi (2021). R: ?statistiksel hesaplama i?in bir dil ve ortam. R Foundation for Statistical Computing, Viyana, Avusturya. URL https://www.R-project.org/
- Van Boxtel, G.J.M., Laboissière, R., & Wilhelm, H.D. (2021). gsignal: Sinyal i?leme. URL: https://github.com/gjmvanboxtel/gsignal
→ .